レーダ基盤技術
多周波ステップ方式
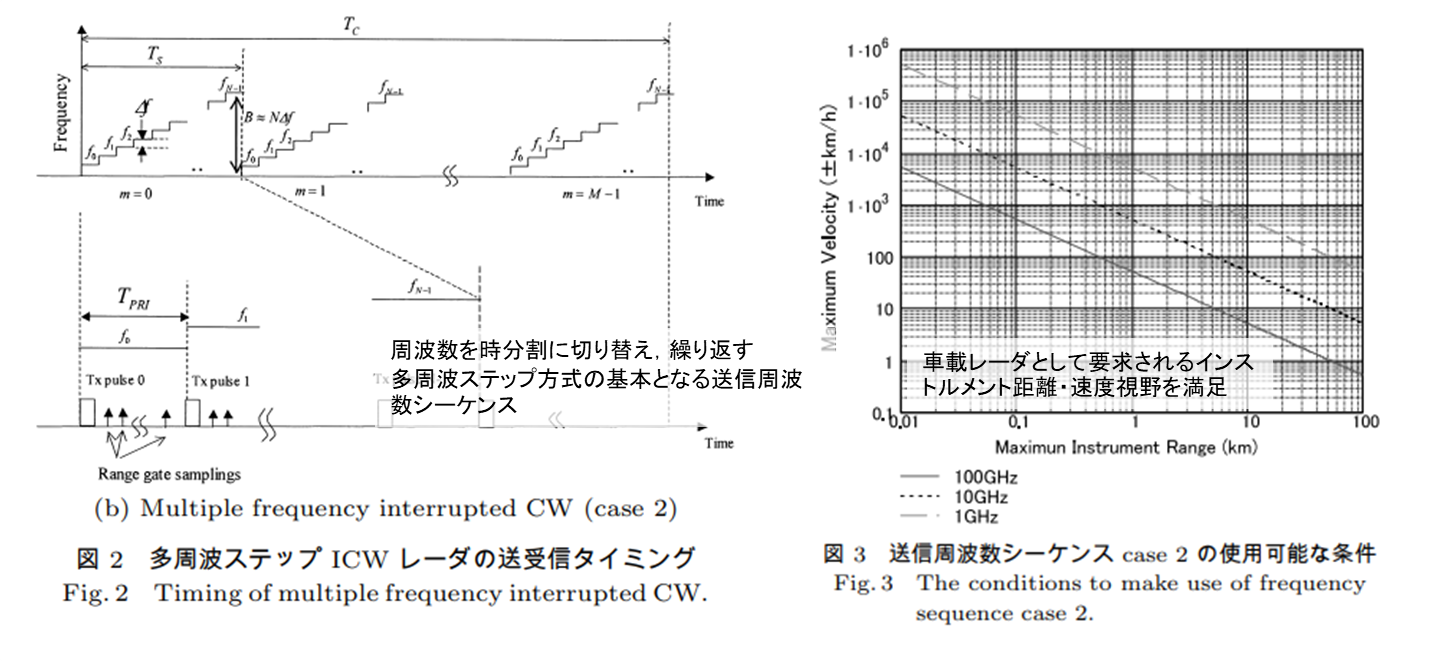
多周波ステップICW方式
多周波ステップICW方式は,多周波ステップ方式の基本となるレーダ変復調方式です。信号処理による合成は,距離を時間で計測するのではなく位相計測で実現します。位相は360度で回転する(アンビギュイティがある)ため、送信波をパルス化して時間遅延による距離ゲートを導入した方式です(電子情報通信学会論文賞受賞)。
多周波ステップパルス圧縮方式
多周波ステップ方式のパルスを探知距離延伸のため符号拡散したパルス圧縮波とした方式です。
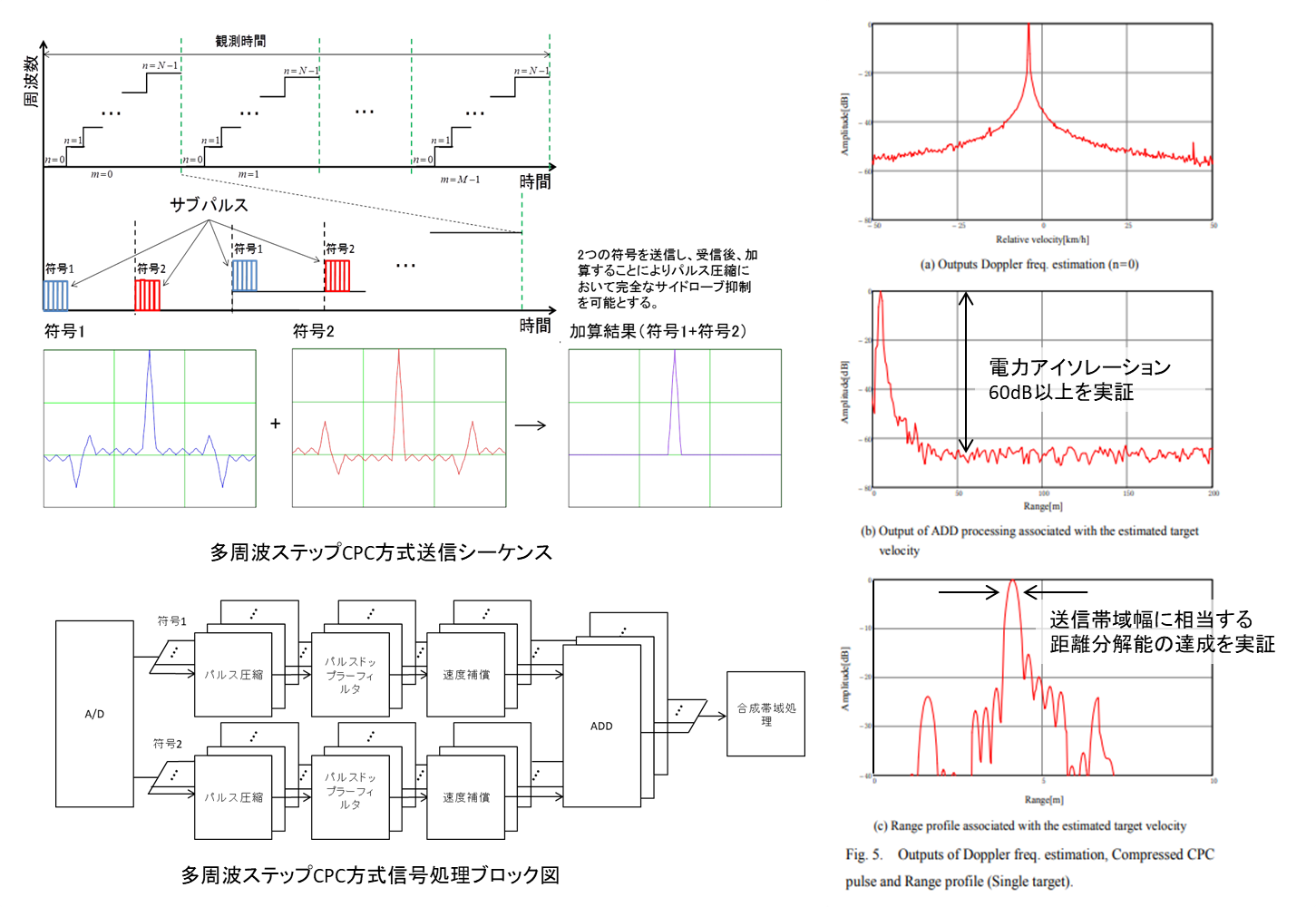
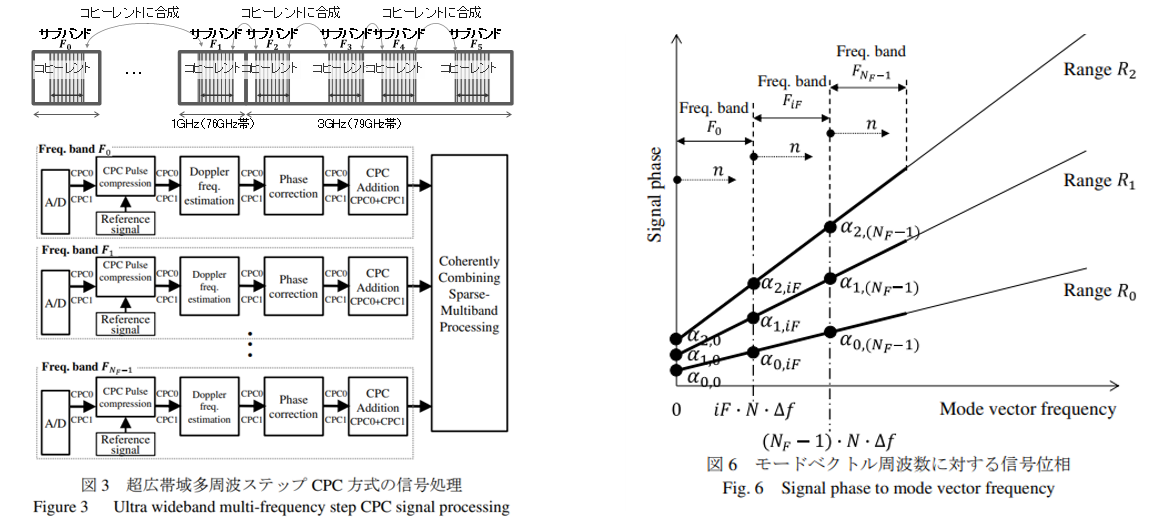
多周波ステップCPC方式
近距離レーダの場合は,電波の往復時間が短くパルス繰り返し時間(PRI)が小さいため,長い符号長がとれず,通常の符号では電力アイソレーションを大きくできません。短い符号長で電力アイソレーションを達成する相補符号をPRI毎に切り替えて(これも時分割)送信する方式です。多周波ステップCPCミリ波レーダを開発し実験的検証を行っています(テレコムシステム技術賞を受賞)。
{kind=link}
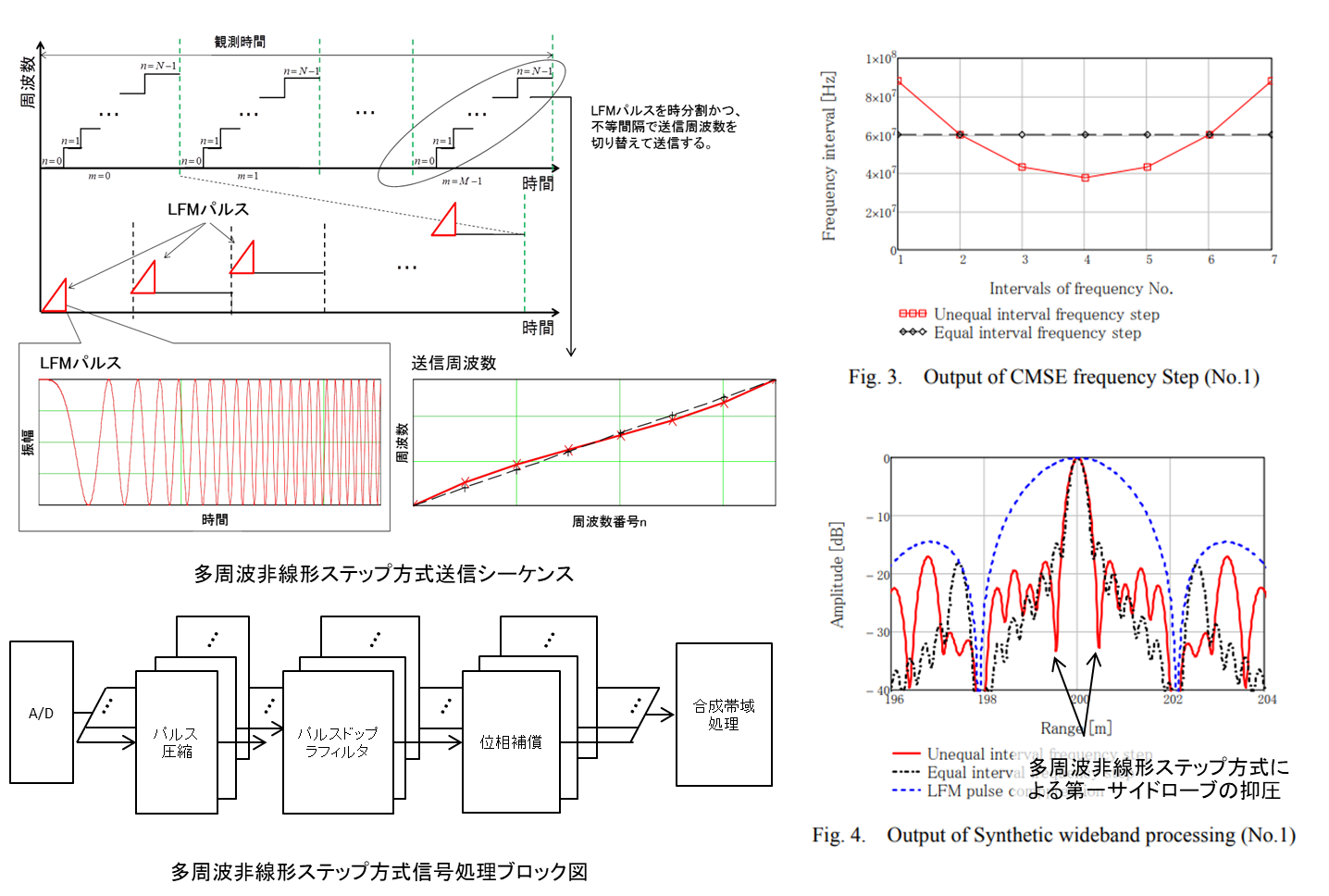
多周波非線形ステップ方式
送信周波数を時分割で、不等間隔で切り替えることにより、受信信号に損失なく距離サイドローブを低減し、 さらに狭受信機帯域幅にて高距離分解能を実現するレーダ変復調方式です。
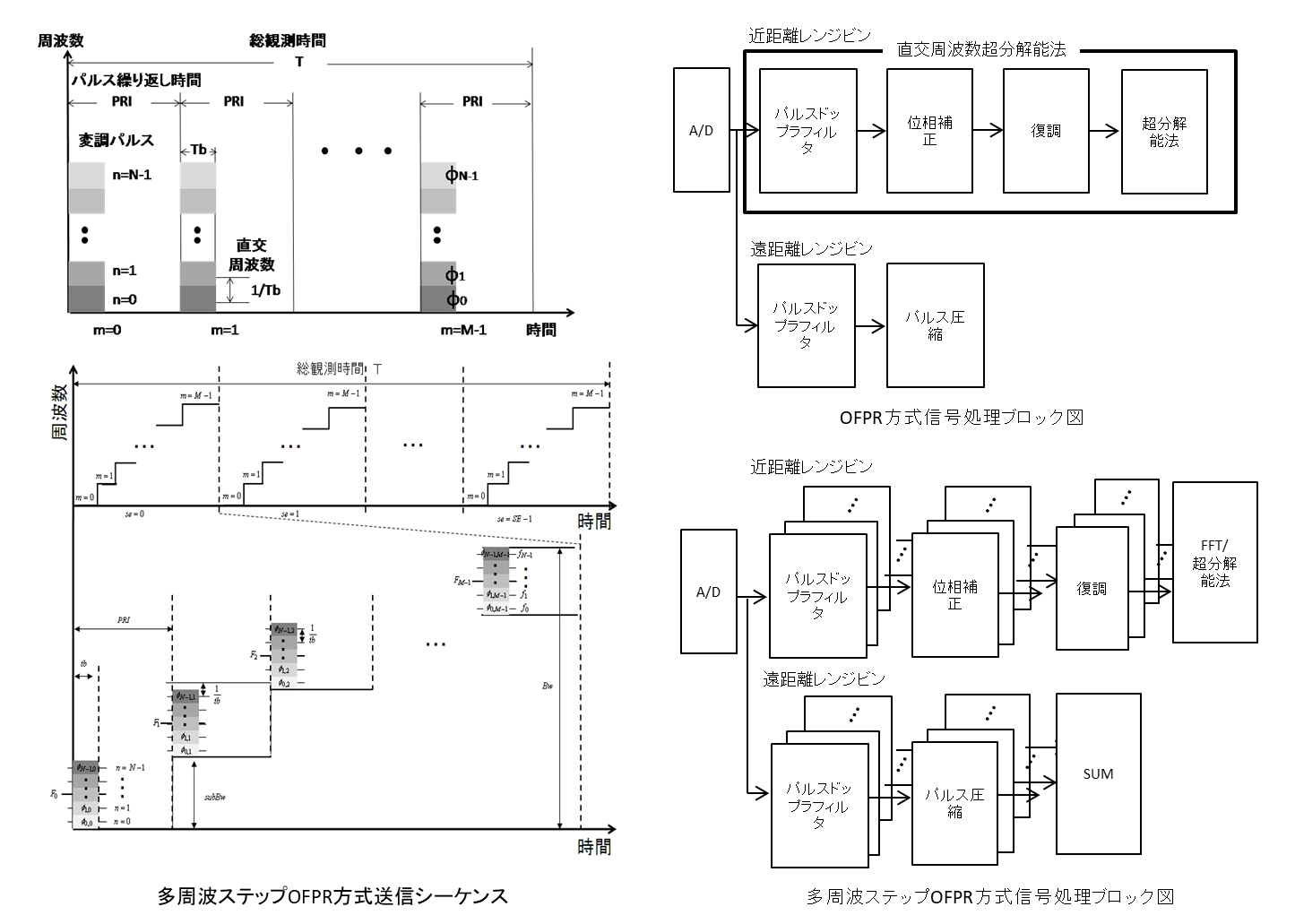
多周波ステップOFPR方式
位相変調パルス圧縮レーダとは異なり時間軸上のみならず直交周波数上に位相符号を配置することにより、 パルス圧縮レーダと比較して高距離分解能を実現するレーダ変復調方式です。
多周波CW方式
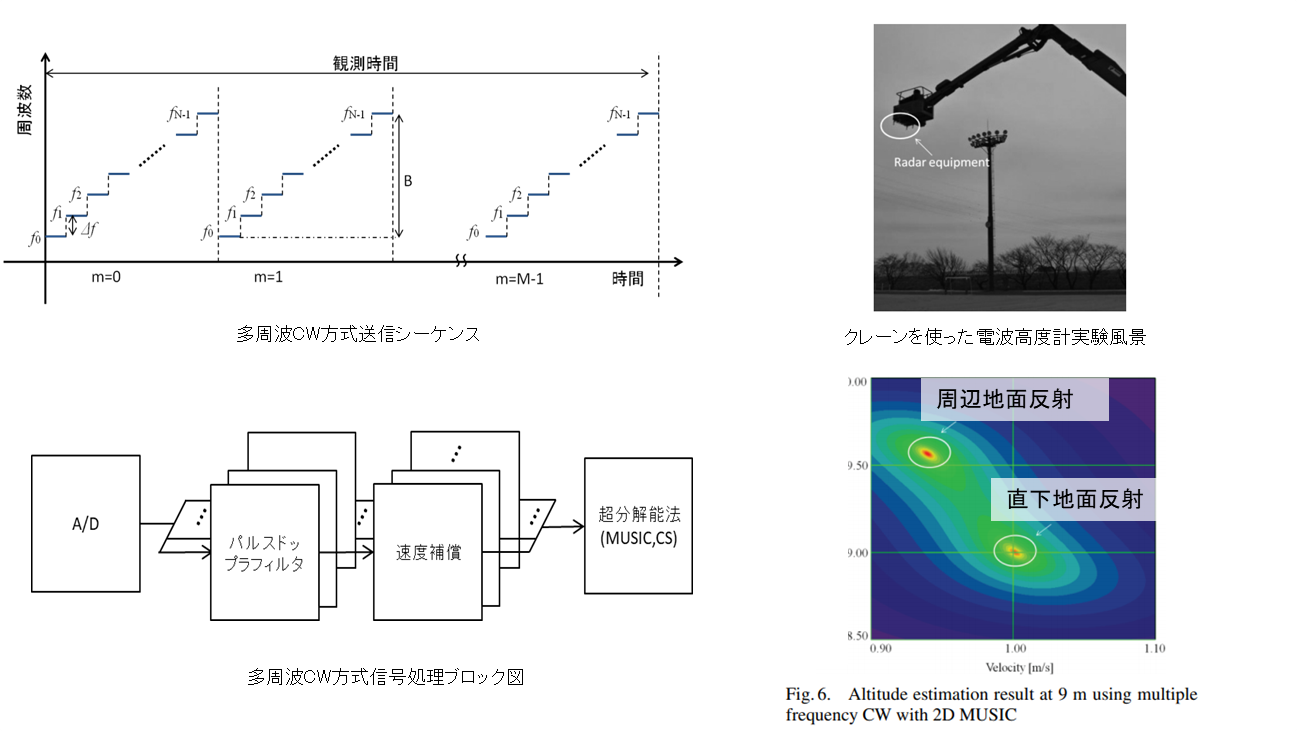
多周波CW方式
多周波CW方式は多周波ICW方式のパルス化を省略(送信波をCW化)し,より狭帯域で複数目標の計測を可能とした方式です(電気学会論文賞受賞)。
{kind=link}
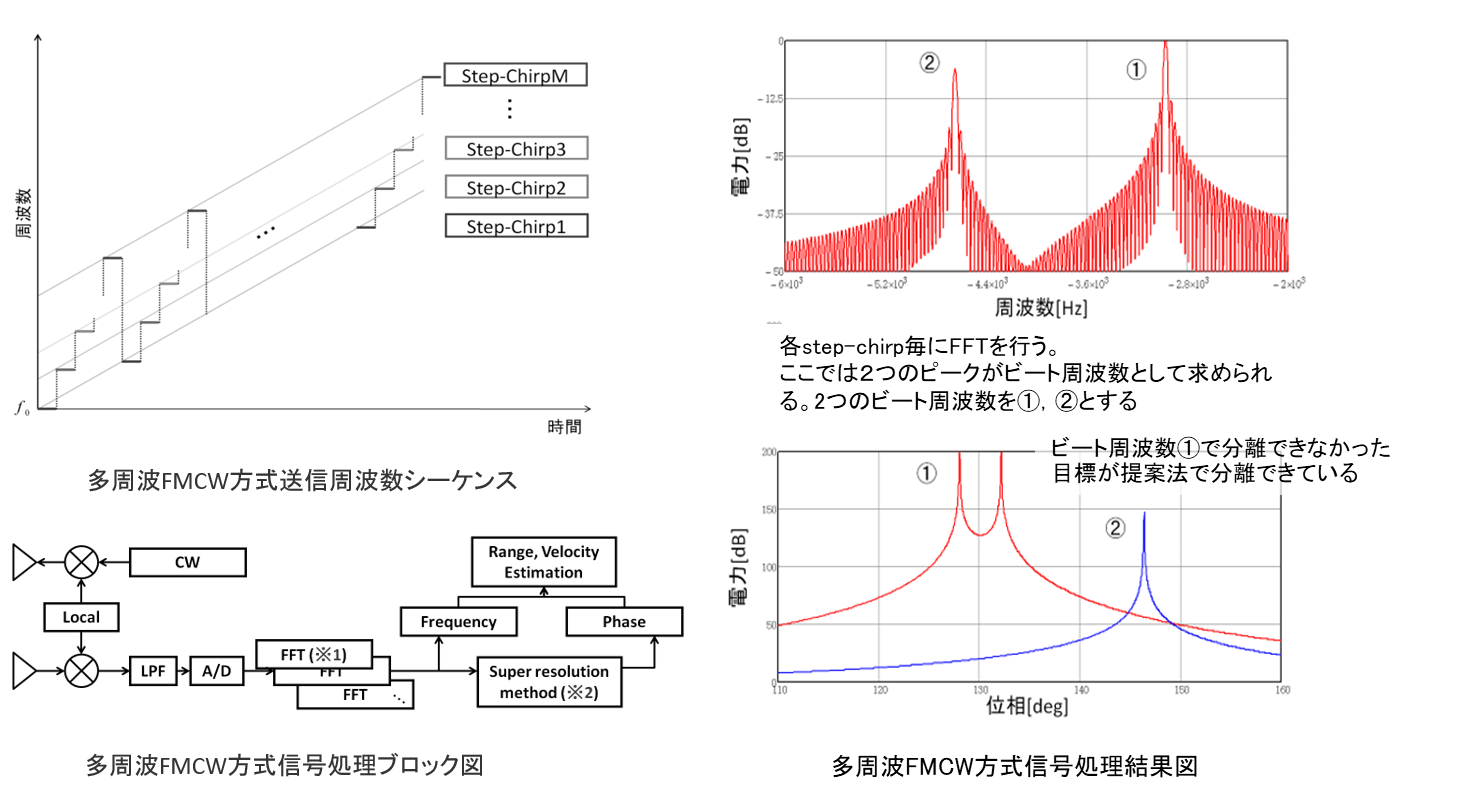
多周波FMCW方式
FMCW方式の課題であるペアリング誤作動を生じることなく目標の距離・速度推定を可能とし、さらに同一ビート周波数上の目標分離も実現するレーダ変復調方式です。
超広帯域多周波ステップ方式
離隔多周波ランダムステップ方式(離隔周波数合成法)
個別の非同期レーダ間の複素振幅を推定し、超広帯域のコヒーレント合成を実現する方式です
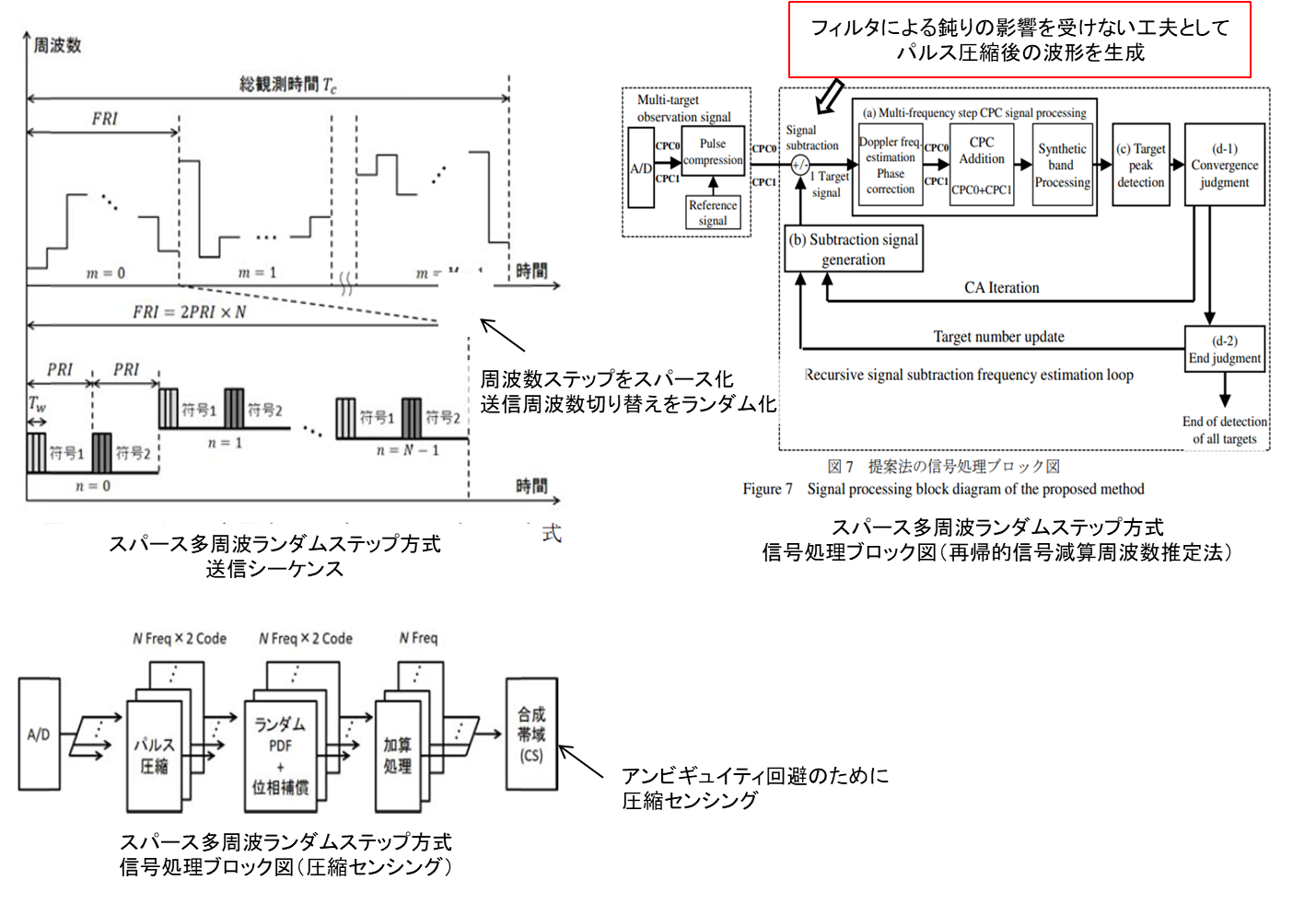
スパース多周波ランダムステップ方式
周波数ステップや相補符号がPRI毎に時分割とするための課題として速度視野低、または距離視野低下という問題が生じる。速度視野は、ランダムPRIとなることで解消し、スパース周波数ステップによる距離視野問題を圧縮センシングで解消させています
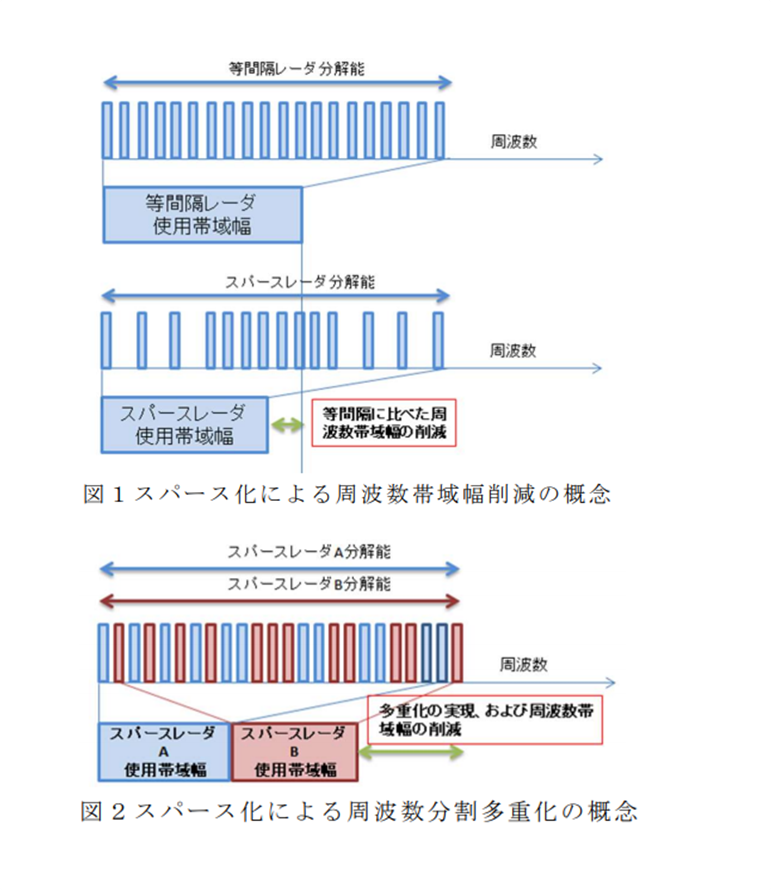
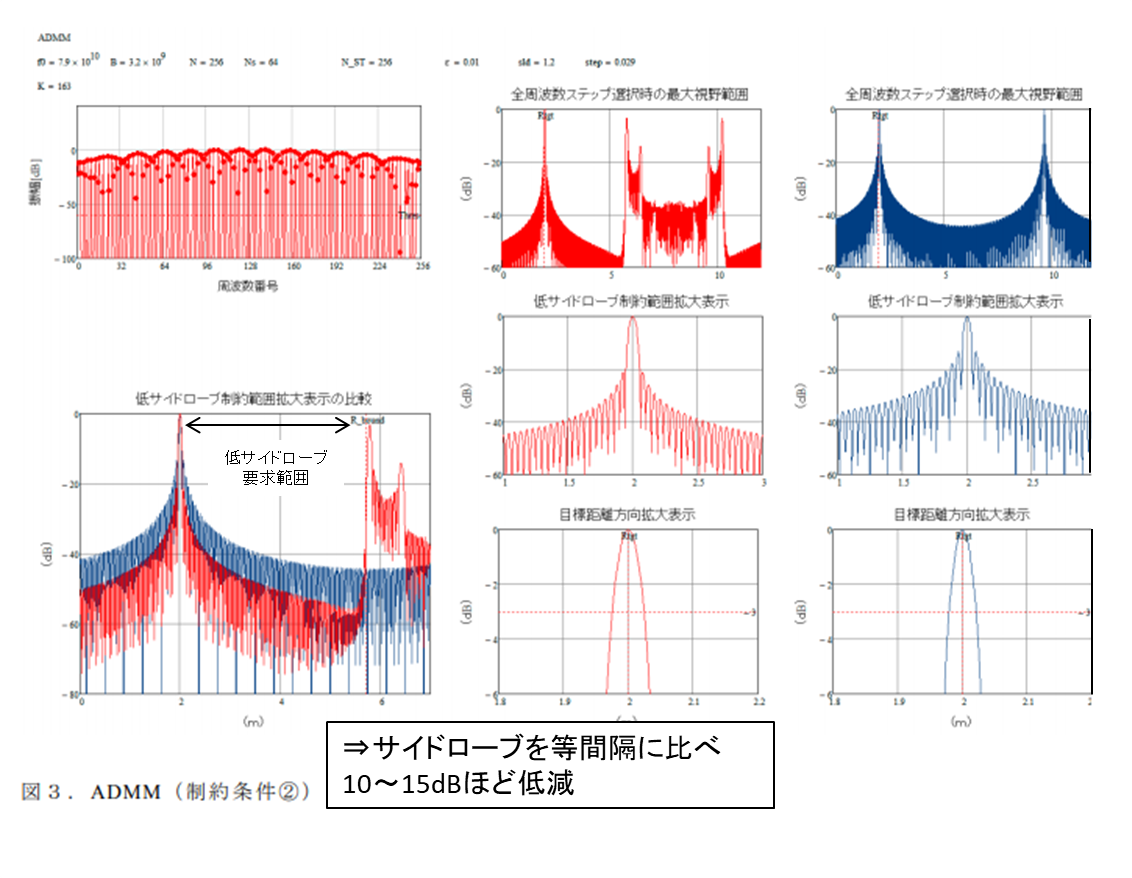
スパース周波数分割方式
合成帯依拠処理は通常のフーリエ変換として、周波数ステップをどのようにスパースにすると、アンビギュイティやサイドローブが低減できるかを圧縮センシングを用いて設計判断します。
符号変調方式
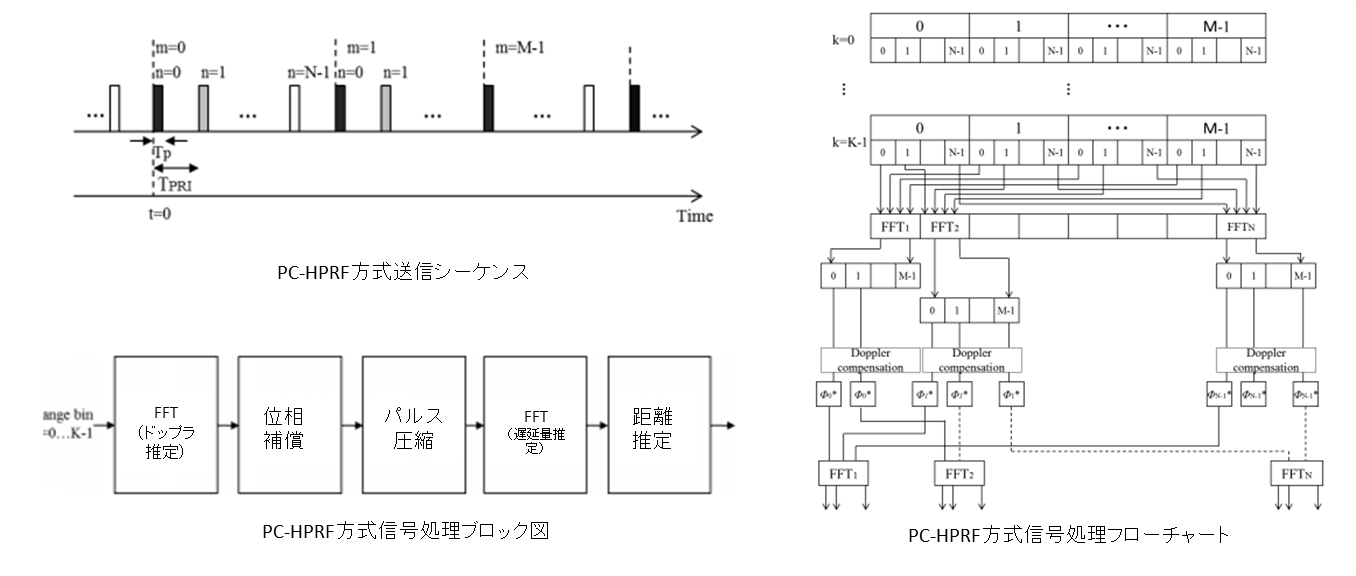
PC-HPRF方式
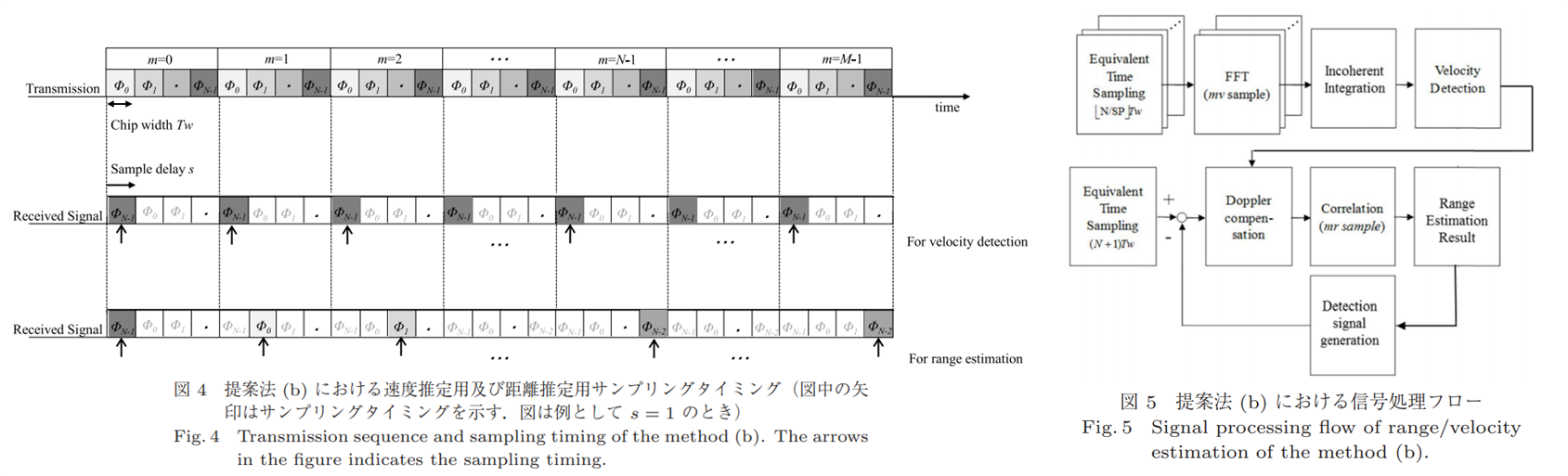
Phase Coded H-PRF方式は、パルス間周期符号変調によりパルス方式で課題となる探知距離の延伸と距離アンビギュイティの解决を図った方式です。
{kind=link}
等価時間サンプリング符号変調CW方式
PN符号を用いた符号変調CW方式による距離分解能と低サンプリングレートの両立の解決手段として,等価時間サンプリングを適用した等価時間サンプリング符号変調CW方式が考えられる.等価時間サンプリングの適用に伴う(1)SN比改善能力の不足,符号変調CW方式特有の課題である符号長やドップラシフトの影響による(2)目標間アイソレーション不足といった目標検出性能における課題の改善を図る信号処理方式を提案しています。
不要波抑圧時空間信号処理
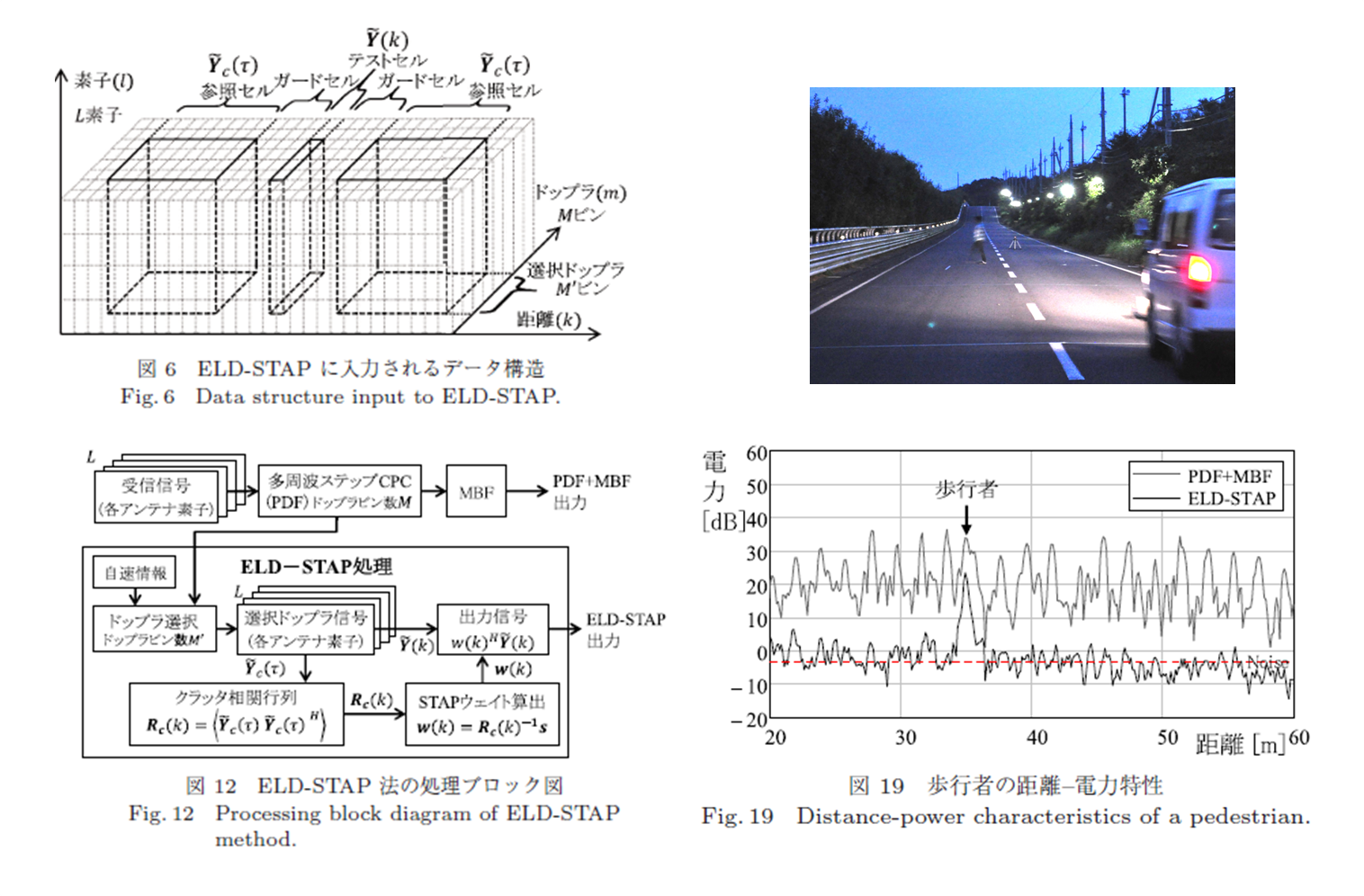
ELD-STAP(Element Localized Doppler-Space Time Adaptive Processing)
STAPでは、アレーアンテナで受信した時間方向(パルス方向)と空間方向(アンテナ方向)の二次元計測データを用いて、クラッタや干渉波などの不要波の抑圧を行います。(A)目標の相対速度とクラッタが離れているときはクラッタと目標を分離できますが、(B)目標の相対速度とクラッタが近接する状況(目標が低速で移動する場合)ではクラッタと目標の分離が困難です。そこで、STAPを用いることで、(B)目標の相対速度とクラッタが近接する状況(目標が低速で移動する場合)においても目標を検出することが期待されます。
画像レーダ方式
ドップライメージング
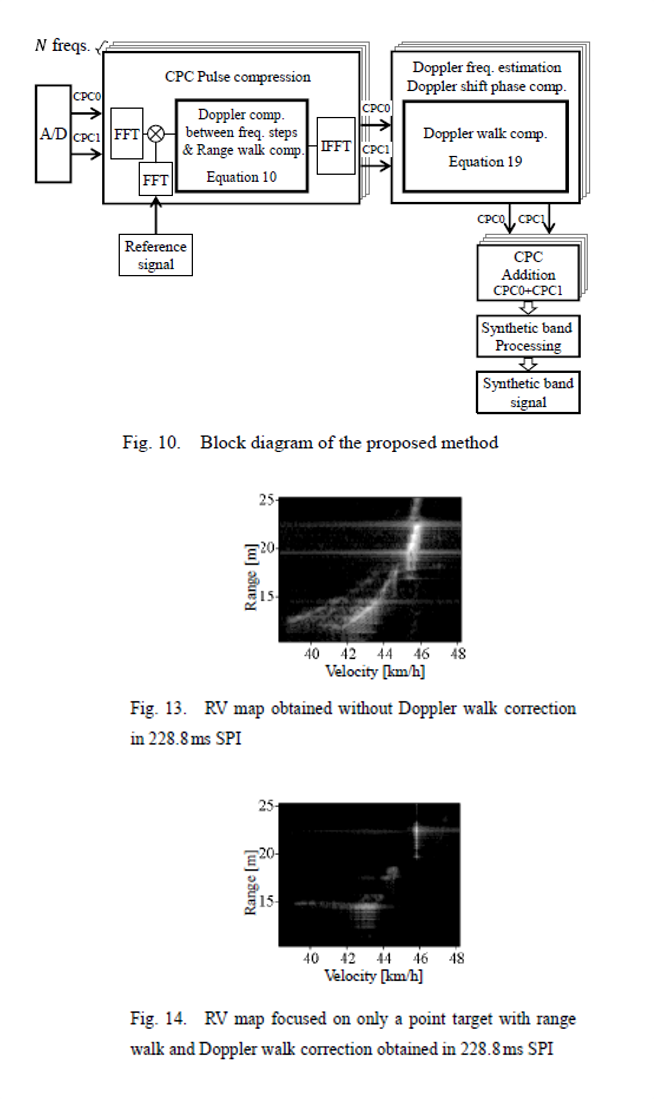
多周波ステップ方式の車載レーダ等への応用を想定した前側方の静止物に対する距離と速度の2次元画像(RV マップ)を高精度に生成する手法.画像の高精度化を実現するために,多周波ステップ方式 の周波数ステップ間でのドップラ周波数の周波数依存によるドップラ拡がりをはじめ,計測時間内で発生するレーダの移動にともなうレンジウォークとドップラウォークのすべてを補償可能とするドップラ補正法が復調処理に組み込まれています.
角度高分解能,MIMO
目標検知方式
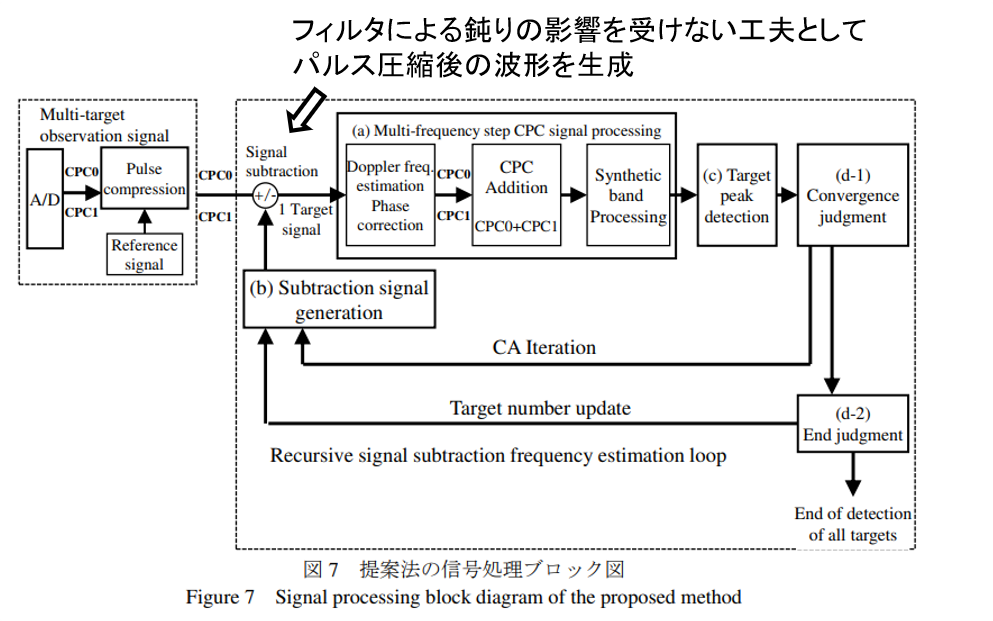
再帰的信号減算周波数推定法
再帰的信号減算周波数推定法は,信号処理最後段の DFT による合成帯域処理出力の電力の大きい目標から逐次その目標信号を再構成し減算イテレーションする方法です.再帰的信号減算周波数推定法は,減算信号作成においてパルスドップラフィル タと合成帯域の slow time 処理にて得られた信号振幅値を用いてパルス内の時間波形(fast time)を生成す ることで,当該減算手法で課題となる受信機のLPFの影響などの定式化困難な誤差に対してロバストとなるよう配慮していることを特徴としています.
背景クラッタ環境小物体検知
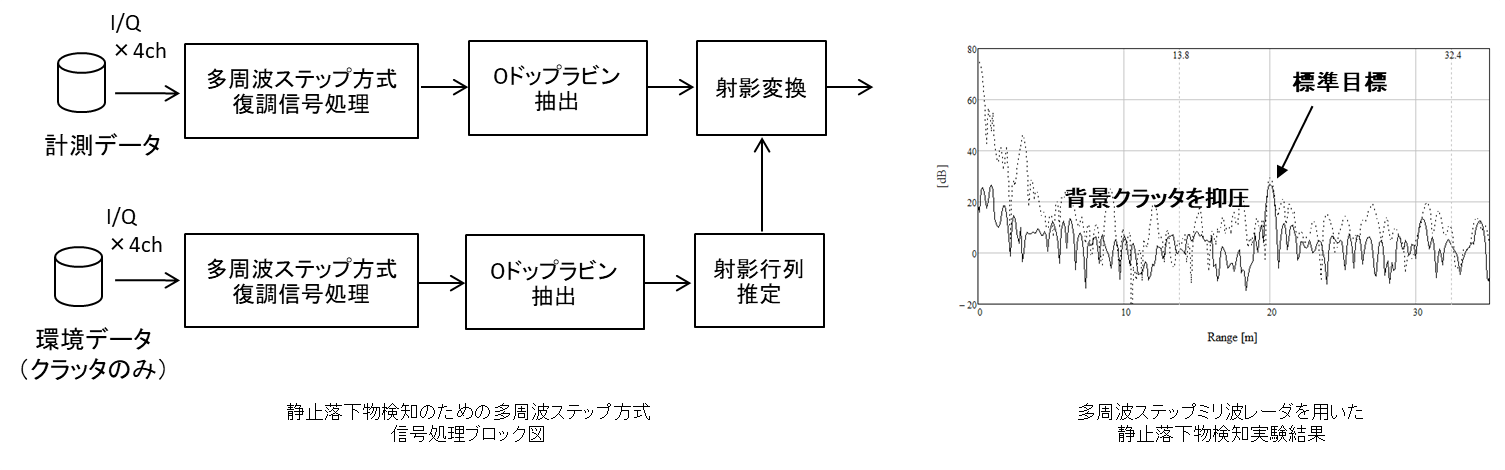
静止小物体が落下する以前の環境信号をあらかじめ取得しておき,逐次その環境信号を減算するという原理に基づく信号処理により地面反射というクラッタに埋もれた小落下物の検知能力向上が期待されます.多周波ステップレーダにおけるMSN(Maximum Signal to Noise ratio)に基づく静止小物体検知法を示します.
マルチパスフェージング環境目標検知
目標認識技術
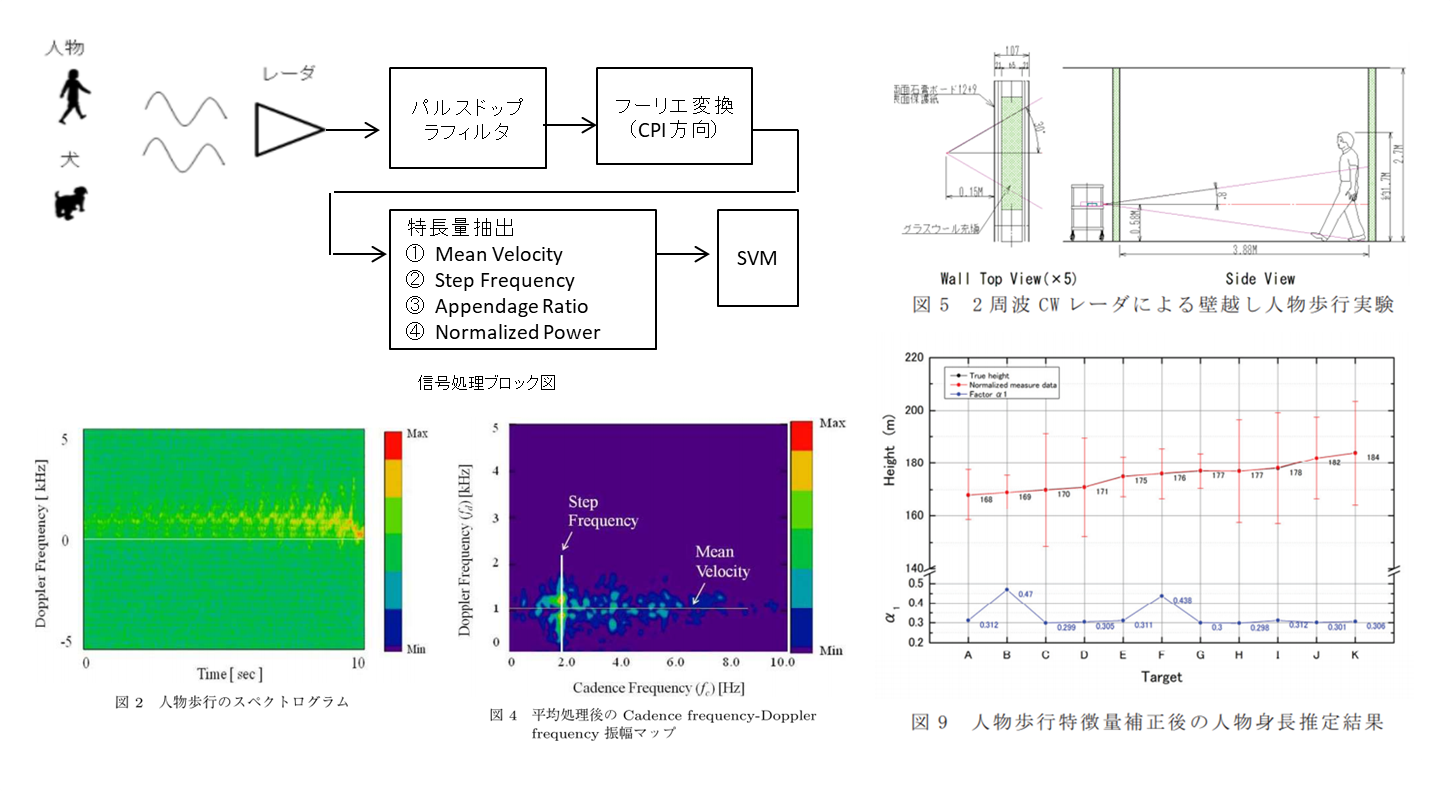
歩行人物特徴量抽出
レーダから得られた検知データ(距離、速度、角度)から特徴量抽出を行い、学習アルゴリズムを適用することで、人間や犬といった認識を行います。 学習アルゴリズムとしてサポートベクターマシーン(Support Vector Machine:SVM)を適用します。 SVMは基本的には線形の識別器ですが、高次元に写像 するカーネル関数と最適化法の組み合わせにより非線形の識別器に拡張でき、優れたパターン認識結果が得られます。 さらにこれらの特長量を組み合わせて人物の身長推定を行っています
レーダ多重化方式
多重化(同期)
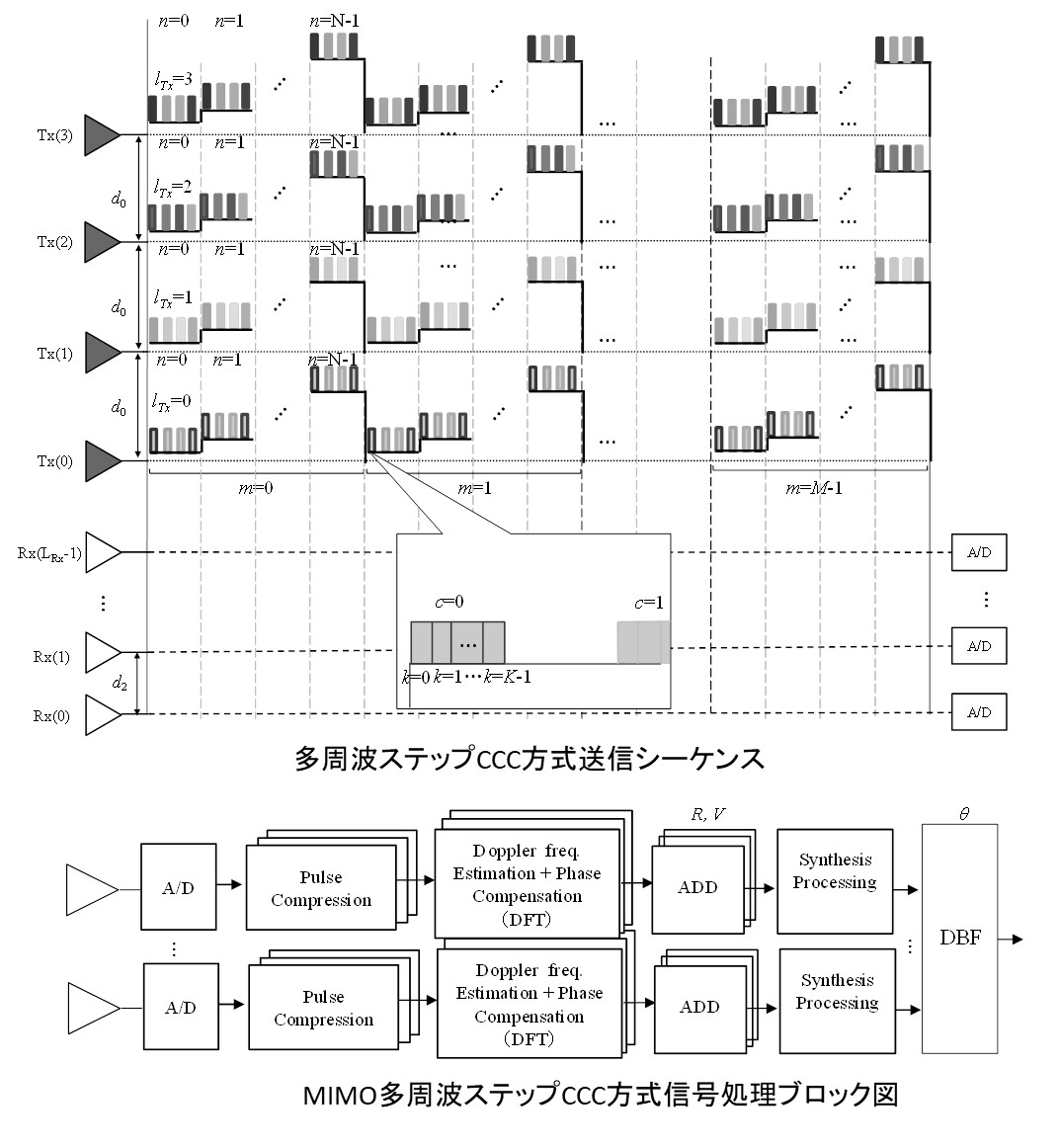
多周波ステップCPC方式の高角度分解能化のためのMIMO化を検討するにあたり,送信アンテナ間の直交性を保つために異なる組同士の相互相関の和がすべて0,自己相関の和がτ=0でのみ1,その他すべて0である完全相補符号(Complete Complementary Code)の導入を検討しました.
多重化(非同期)
多周波ステップ方式は.狭い瞬時帯域幅の周波数を時分割でステップ状に送受信することが特徴である.この特徴を活用し全周波数帯域幅をスパースに不等間隔周波数ステップすることで距離分解能を維持したまま周波数帯域幅削減や複数の組に分割することで帯域内に複数のレーダを共存させる周波数多重化のための櫛型周波数分割配置を提案しています。