RESEARCH
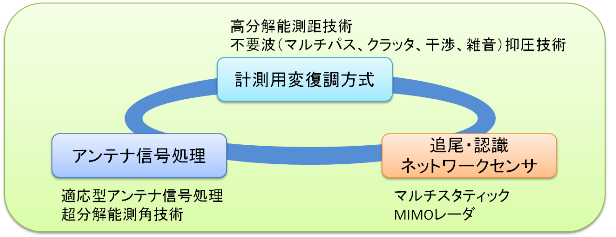
稲葉研究室では、電磁波等を用いた計測方式、および計測システムの研究を行っています。研究のテーマの1つである車載レーダでは、限られた送信電力にて遠距離と近距離広角の両用化、限られた周波数帯域幅で高距離分解能化を実現するための変調方式、複雑な環境にて目標を検出するための不要波抑圧技術、アレイアンテナ信号処理技術に取り組んでいます。今後は、ネットワークレーダ、MIMOレーダなどへテーマを発展させていく予定です。
1)レーダ技術の開発と普及
計測用レーダ変復調方式
相補の関係となる2つの符号を用い、それぞれのパルス圧縮後の信号を加算することで距離 サイドローブキャンセルを 可能とするCPC(Complementary Phase Code)を送信信号とし、送信周波数を時分割で切り替える ことにより狭受信機帯域幅にて高距離分解能を実現するレーダ変復調方式です。
多周波非線形ステップLFM方式
送信周波数を時分割で、不等間隔で切り替えることにより、受信信号に損失なく距離サイドローブを低減し、 さらに狭受信機帯域幅にて高距離分解能を実現するレーダ変復調方式です。
OFPR(Orthogonal Frequency Pulse Radar)方式/多周波ステップOFPR方式
位相変調パルス圧縮レーダとは異なり時間軸上のみならず直交周波数上に位相符号を配置することにより、 パルス圧縮レーダと比較して高距離分解能を実現するレーダ変復調方式です。
多周波CW方式
多周波CW方式は多周波ICW方式のパルス化を省略(送信波をCW化)し,より狭帯域で複数目標の計測を可能とした方式です。
多周波FMCW方式
FMCW方式の課題であるペアリング誤作動を生じることなく目標の距離・速度推定を可能とし、さらに同一ビート周波数上の目標分離も実現するレーダ変復調方式です。
PC-HPRF Phase Code Pulse方式
PC-HPRF(Phase Coded High Pulse Repetition Frequency)方式は、パルス間周期符号変調により距離アンビギュイティの解决と探知距離の延伸を図った方式です。
共同研究・実験
車載レーダ(STOP&GO・横切り)
鉄道安全監視システム(列車搭載実験)
安全運転支援システム
バス車内安全モニタ
呼吸計測
シロアリの非接触検知
壁越し身長推定実験
月着陸レーダ
独自研究・実験
多周波ステップCPC方式原理検証実験
PC-HPRF原理検証実験
イメージング
多重化(同期)
角度超分解能
小落下物検知
2)多周波ステップレーダの研究開発
超分解能レーダと光学画像センサを融合した鉄道安全監視技術に関する研究(JRTT)
概要
車載レーダ(前方車両追尾)
鉄道安全監視システム(踏切内歩行者検知・ホーム転落)
報道(1)
クローズアップ現代報道(2)
おはよう日本狭帯域・遠近両用高分解能小型レーダー技術の研究開発 (総務省(電波資源拡大のための研究開発))
概要
探知距離・遠近両用高分解能性
衝突回避実験車両
不要波抑圧時空間信号処理技術
目標追尾技術
目標認識技術
総合試験
3)周波数有効利用研究の追求
超広帯域コヒーレントレーダ技術の研究開発(総務省(SCOPE))
概要
離隔周波数合成方式
超広帯域多周波ステップ方式
スパース周波数分割レーダの研究開発(総務省(SCOPE))
概要
スパース周波数不等間隔分割設計技術
スパース周波数分割アダプティブ技術
4)レーダ技術の展開
スペースデブリ
VLBI
STAP(Space Time Adaptive Processing)
STAPでは、アレーアンテナで受信した時間方向と空間方向の二次元計測データを用いて、クラッタや干渉波などの不要波の抑圧を行います。
追尾・認識技術
追尾フィルタ
追尾フィルタはレーダからの観測データ(距離・速度・角度)をもとに、目標の位置や速度の真値を推定します。
人物歩行認識
レーダから得られた検知結果から特徴量を抽出し、学習アルゴリズムを適用することで人物の歩行を認識します。