RESEARCH > 追尾フィルタ
一般的にレーダで受信される信号は、目標からの反射波と目標以外(地面や建物など)からの不要反射波が混在しています。そこで、不要反射波であるクラッタ(静止物からの反射波)を抑圧しながら目標を追尾することが必要不可欠であり、これを実現する信号処理として追尾フィルタが知られています。追尾フィルタはレーダからの観測データ(距離・速度・角度)をもとに、目標の位置や速度の真値を推定します。
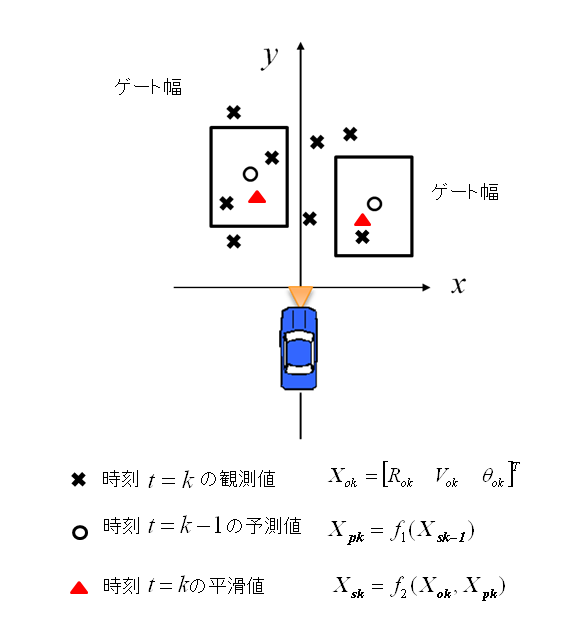
追尾フィルタは前時刻の平滑値(フィルタ出力)から予測値を算出し、周辺にゲート幅を設けます。現時刻のレーダからの観測値が予測ゲート幅内に存在したとき、観測値と予測値を用いて現時刻の平滑値を算出することで目標の位置や速度の真値を推定します。これにより、突発的な観測値を抑圧し、目標の平滑化を図ります。
