RESEARCH > 人物歩行認識
レーダから得られた検知データ(距離、速度、角度)から特徴量抽出を行い、学習アルゴリズムを適用することで、人間や犬といった認識を行います。
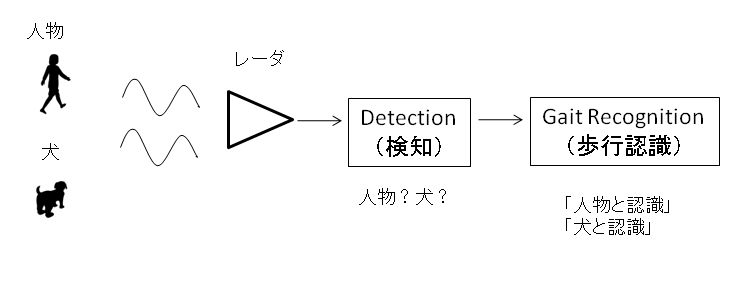
レーダにおける検知と歩行認識
学習アルゴリズムとしてサポートベクターマシーン(Support Vector Machine:SVM)を適用します。 SVMは基本的には線形の識別器ですが、高次元に写像 するカーネル関数と最適化法の組み合わせにより非線形の識別器に拡張でき、優れたパターン認識結果が得られます。
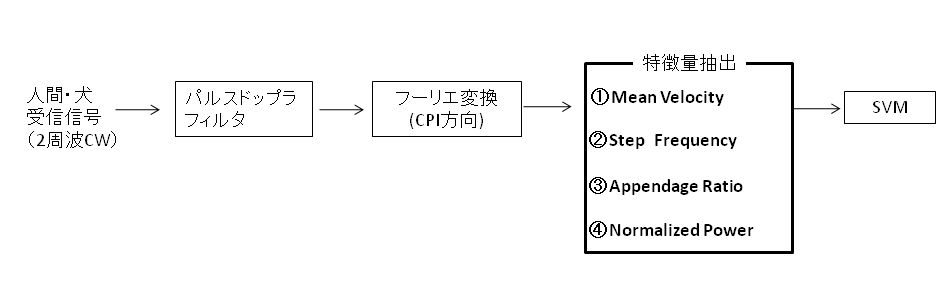
信号処理ブロック
【関連リンク】